
👥 🚗 Two Workshop Talks at IEEE Intelligent Vehicles Symposium 2025 in Romania 🇷🇴 🎉
I had the pleasure of contributing to two exciting workshops at IV2025 in Romania, focusing on safety and uncertainty in autonomous driving.
I received my B.Sc. in Mathematics and Management from Ulm University, Germany, in 2015. I then earned an M.Sc. in Applied Mathematics from Missouri University of Science and Technology, USA, in 2017, followed by an M.Sc. in Computational Science and Engineering from Ulm University in 2019.
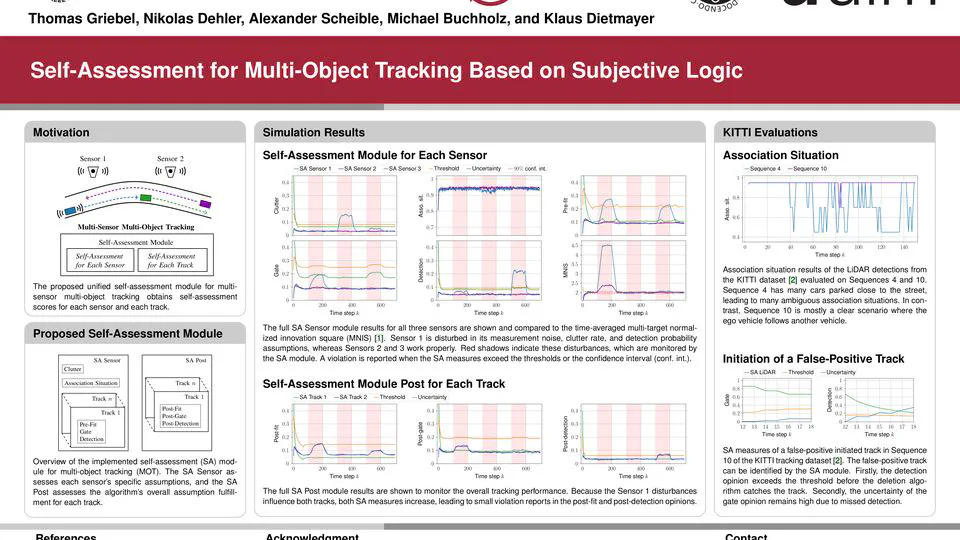
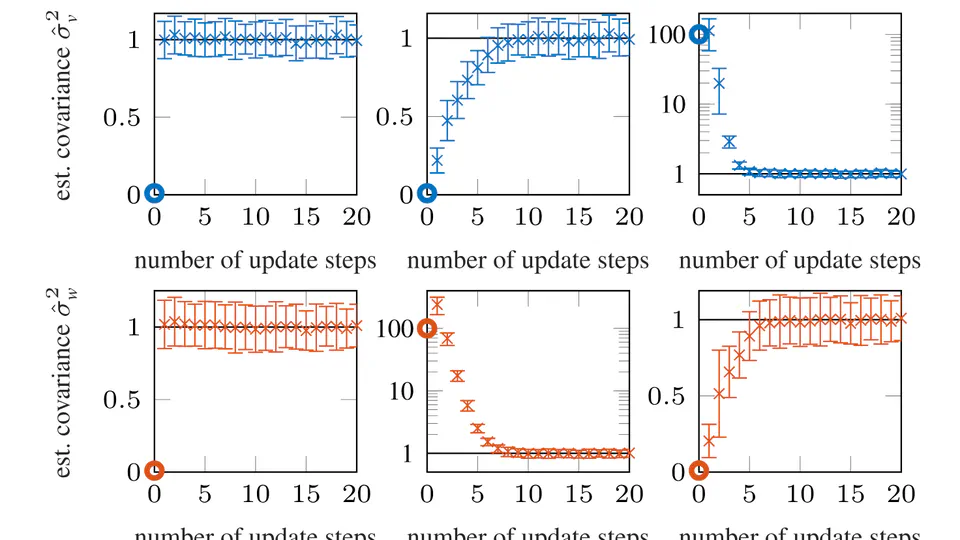
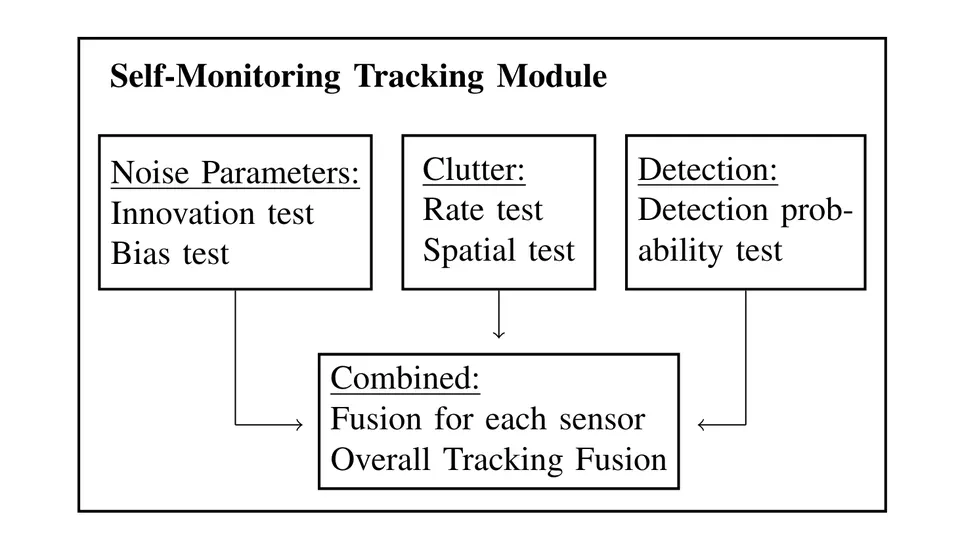
Since 2019, I have been a researcher at the Institute of Measurement, Control and Microtechnology at Ulm University. My research focuses on sensor data fusion, filtering and estimation, and signal processing - particularly in the context of environment perception for autonomous driving. I am especially interested in monitoring and self-assessment of tracking algorithms to enhance the robustness of sensor fusion systems.
PhD Sensor Data Fusion
Ulm University, Germany
M.Sc. in Computational Science and Engineering
Ulm University, Germany
M.Sc. in Applied Mathematics
Missouri University of Science and Technology, USA
B.Sc. in Mathematics and Management
Ulm University, Germany
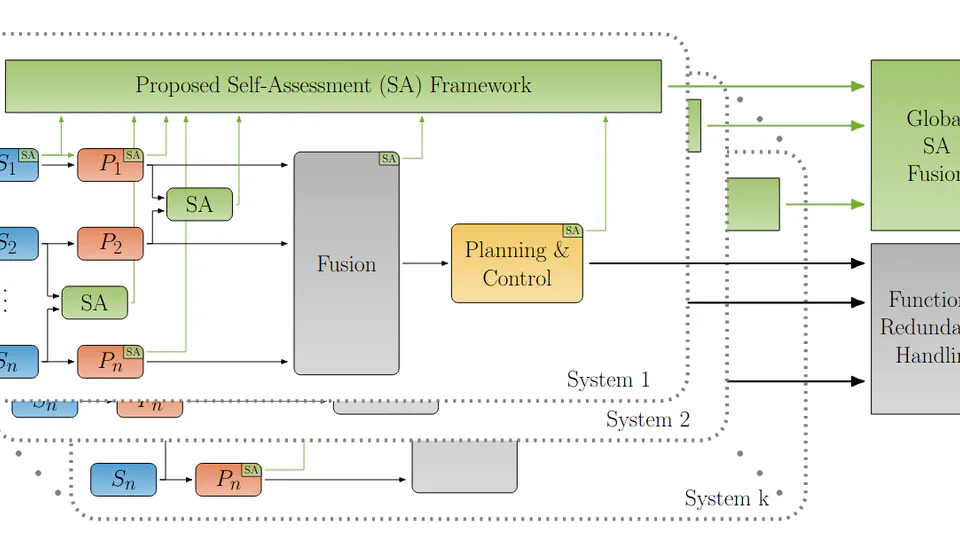
As a Ph.D. researcher at the Institute of Measurement, Control and Microtechnology at Ulm University, my work focuses on developing robust sensor fusion techniques for autonomous driving systems. A central aspect of my research has been on monitoring and self-assessment of tracking algorithms, aiming to improve the reliability and robustness of multi-sensor fusion pipelines.
During this time, I have authored and co-authored nine first- or co-first-author publications, along with several additional co-author contributions. These works have primarily been published at leading IEEE and ISIF conferences, including IV, ITSC, FUSION, and MFI.
I have contributed to several collaborative research projects, with key roles in the SecForCARs and EVENTS projects, focusing on secure and reliable environment perception systems for intelligent vehicles.
Beyond my core research, I am actively involved in student mentoring. I have supervised three Bachelor’s theses and five Master’s theses, primarily in the areas of sensor fusion, environment perception, and autonomous driving. In addition, I have mentored seven working and research students.
I have also gained substantial teaching experience, serving as an exercise supervisor in Digital Control Systems and in practical courses such as Measurement and Automation Technology and Control Engineering. Earlier in my academic journey, I held several teaching assistant positions during my Master’s and Bachelor’s studies in both the USA and Germany.
(Last updated: April 9, 2025)


I had the pleasure of contributing to two exciting workshops at IV2025 in Romania, focusing on safety and uncertainty in autonomous driving.
We are thrilled to have received the Best Paper Award at FAS-Workshop 2025 for our work on self-assessment in autonomous driving systems.
I had the pleasure of presenting our work titled Ein neuer Ansatz zur Selbstüberwachung von Filter- und Trackingverfahren mittels Subjective Logic at the 59th Regelungstechnisches Kolloquium in Boppard.
I successfully defended my PhD thesis titled Self-Assessment in Tracking Algorithms Using Subjective Logic.
I had the honor of giving a lightning talk at the Workshop on CCAM Trust Assessment for Safety and Security on the topic of Leveraging Subjective Logic for Self-Assessment in Tracking Algorithms.