Self-Assessment for Multi-Object Tracking Based on Subjective Logic
Jun 5, 2024· ,,,,·
0 min read
,,,,·
0 min read
Thomas Griebel
Nikolas Dehler
Alexander Scheible
Michael Buchholz
Klaus Dietmayer
Abstract
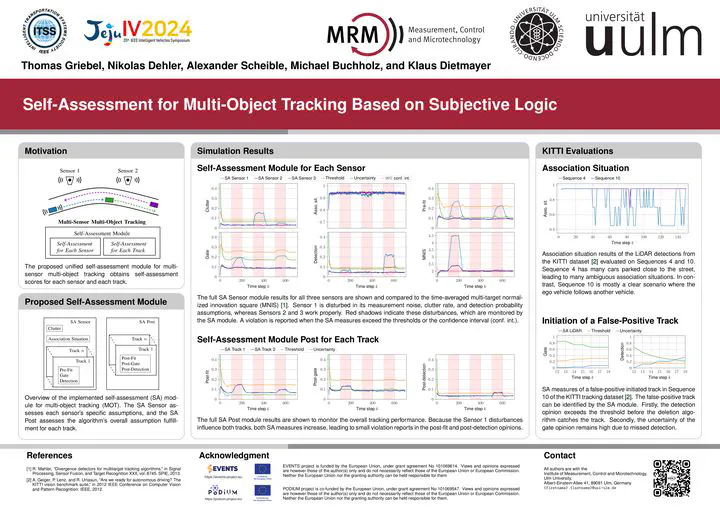
In automated driving, the safety and robustness of the overall system are among the most important key challenges today. To tackle these safety and robustness challenges, the monitoring and self-assessment of all modules in the automated system is necessary. Tracking surrounding objects as part of the environmental perception is a key module in automated systems. Thus, this work presents a novel overall concept and framework for self-assessment in multi-object tracking based on the subjective logic theory. The self-assessment concept is comprehensively discussed and evaluated by simulations and real-world data of the KITTI dataset, showing the relevance of this proposed method.
Type
Publication
In 2024 IEEE Intelligent Vehicles Symposium (IV)